Computer vision
An Introduction to Image Segmentation: Deep Learning vs. Traditional [+Examples]
13 min read
—
Aug 12, 2021

Learn about different segmentation techniques, collect data, and use V7 to start working on your computer vision projects today.

Hmrishav Bandyopadhyay
Guest Author
Image segmentation is a prime domain of computer vision backed by a huge amount of research involving both image processing-based algorithms and learning-based techniques.
In conjunction with being one of the most important domains in computer vision, Image Segmentation is also one of the oldest problem statements researchers pondered upon, with first works involving primitive region growing techniques and optimization approaches developed as early as 1970-72.
Here’s what we’ll cover:
What is Image Segmentation?
Annotation for Image Segmentation
Types of Image Segmentation tasks
Traditional Image Segmentation techniques
Deep Learning-based Image Segmentation
Image Segmentation applications
Ready? Let’s jump right into it.

What is Image Segmentation?
Image segmentation is a sub-domain of computer vision and digital image processing which aims at grouping similar regions or segments of an image under their respective class labels.
Since the entire process is digital, a representation of the analog image in the form of pixels is available, making the task of forming segments equivalent to that of grouping pixels.
Image segmentation is an extension of image classification where, in addition to classification, we perform localization. Image segmentation thus is a superset of image classification with the model pinpointing where a corresponding object is present by outlining the object's boundary.

In computer vision, most image segmentation models consist of an encoder-decoder network as compared to a single encoder network in classifiers.
The encoder encodes a latent space representation of the input which the decoder decodes to form segment maps, or in other words maps outlining each object’s location in the image.
A typical segment map looks something like this:

Read An Introduction to Autoencoders to learn more about the encoder-decoder network.
Annotation for Image Segmentation
Like all supervised deep learning algorithms, supervised segmentation procedures require large-scale annotated preprocessed data for training.
The type of annotations required varies according to the type of segmentation performed by the model, ranging from very specific annotations required in panoptic segmentation tasks to very simple annotations required in semantic segmentation tasks.
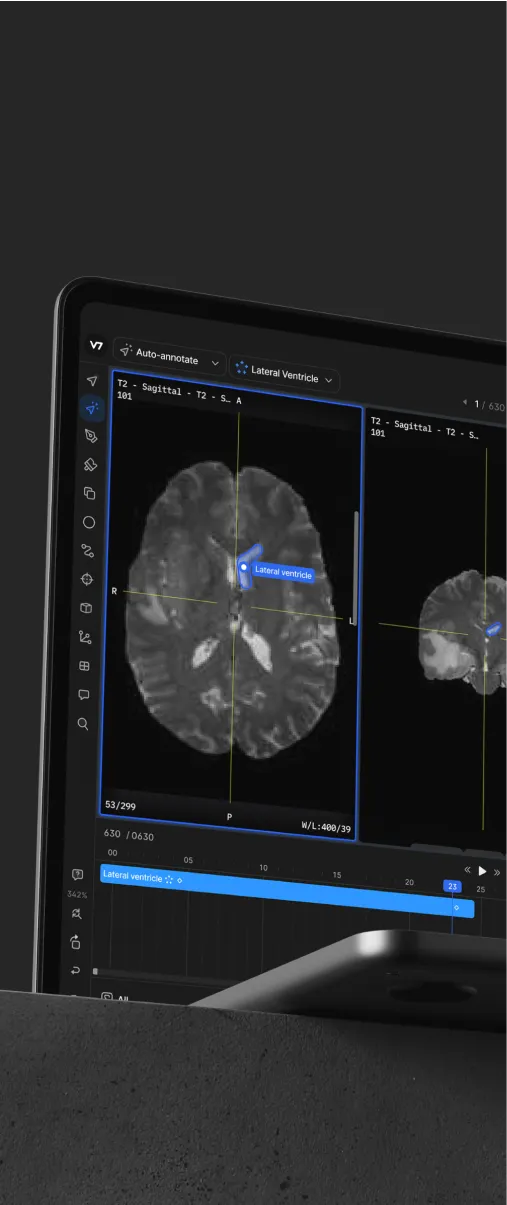
Annotations for segmentation tasks can be performed easily and precisely by making use of V7 annotation tools, specifically the polygon annotation tool and the auto-annotate tool.
Polygon Annotation: Polygon annotation allows us to annotate segment masks (maps) by setting up waypoints throughout the boundaries of objects the model has to segment.
These boundaries help us to form a polygonal region that we can treat as the segment map for a particular object. This form of annotation, however, lacks precision and can be done where the objects are mostly polygonal, or high precision is not of the utmost need.
Auto-annotate: V7’s auto-annotate tool allows us to annotate segment maps very easily by only drawing a bounding box around the target object. The auto-annotate tool, itself a segmentation tool, does the rest by creating a probable boundary region by observing local pixels. The proposed boundary region can then be tweaked to form the exact map of the object.
Auto-annotate can help create high-precision segment maps very quickly for delicate and important use cases like self-driving cars and medical imaging.

The type of annotation required and the precision needed varies according to model use cases and segmentation maps. Annotated datasets for tasks like semantic segmentation are easy to build while annotations for instance and panoptic segmentation are harder as they require to consider overlaps between objects.
Ready to train your models? Have a look at Mean Average Precision (mAP) Explained: Everything You Need to Know.
Similarly, use cases like medical imaging and autonomous vehicles require significantly higher precision annotations for segmentation as compared to other simpler applications.
Here's how you can annotate medical data using V7.
Learn more by reading our Data Annotation Tutorial.
Types of Image Segmentation tasks
Image segmentation tasks can be classified into three groups based on the amount and type of information they convey.
While semantic segmentation segments out a broad boundary of objects belonging to a particular class, instance segmentation provides a segment map for each object it views in the image, without any idea of the class the object belongs to.
Panoptic segmentation is by far the most informative, being the conjugation of instance and semantic segmentation tasks. Panoptic segmentation gives us the segment maps of all the objects of any particular class present in the image.
Let’s explore these tasks in greater detail.
Semantic segmentation
Semantic segmentation refers to the classification of pixels in an image into semantic classes. Pixels belonging to a particular class are simply classified to that class with no other information or context taken into consideration.
As might be expected, it is a poorly defined problem statement when there are closely grouped multiple instances of the same class in the image. An image of a crowd in a street would have a semantic segmentation model predict the entire crowd region as belonging to the “pedestrian” class, thus providing very little in-depth detail or information on the image.
Instance segmentation
Instance segmentation models classify pixels into categories on the basis of “instances” rather than classes.
An instance segmentation algorithm has no idea of the class a classified region belongs to but can segregate overlapping or very similar object regions on the basis of their boundaries.
If the same image of a crowd we talked about before is fed to an instance segmentation model, the model would be able to segregate each person from the crowd as well as the surrounding objects (ideally), but would not be able to predict what each region/object is an instance of.
Panoptic segmentation
Panoptic segmentation, the most recently developed segmentation task, can be expressed as the combination of semantic segmentation and instance segmentation where each instance of an object in the image is segregated and the object’s identity is predicted.
Panoptic segmentation algorithms find large-scale applicability in popular tasks like self-driving cars where a huge amount of information about the immediate surroundings must be captured with the help of a stream of images.

If you are looking for an image annotation tool, check out: 13 Best Image Annotation Tools.
Traditional Image Segmentation techniques
Image segmentation originally started from Digital Image Processing coupled with optimization algorithms. These primitive algorithms made use of methods like region growing and snakes algorithm where they set up initial regions and the algorithm compared pixel values to gain an idea of the segment map.
These methods took a local view of the features in an image and focused on local differences and gradients in pixels.
Algorithms that took a global view of the input image came much later on with methods like adaptive thresholding, Otsu’s algorithm, and clustering algorithms being proposed amongst classical image processing methods.

Thresholding
Thresholding is one of the easiest methods of image segmentation where a threshold is set for dividing pixels into two classes. Pixels that have values greater than the threshold value are set to 1 while pixels with values lesser than the threshold value are set to 0.
The image is thus converted into a binary map, resulting in the process often termed binarization. Image thresholding is very useful in case the difference in pixel values between the two target classes is very high, and it is easy to choose an average value as the threshold.


Thresholding is often used for image binarization so that further algorithms like contour detection and identification that work only on binary images can be used.
Region-Based Segmentation
Region-based segmentation algorithms work by looking for similarities between adjacent pixels and grouping them under a common class.
Typically, the segmentation procedure starts with some pixels set as seed pixels, and the algorithm works by detecting the immediate boundaries of the seed pixels and classifying them as similar or dissimilar.
The immediate neighbors are then treated as seeds and the steps are repeated till the entire image is segmented. An example of a similar algorithm is the popular watershed algorithm for segmentation that works by starting from the local maxima of the euclidean distance map and grows under the constraint that no two seeds can be classified as belonging to the same region or segment map.
Edge Segmentation
Edge segmentation, also called edge detection, is the task of detecting edges in images.
From a segmentation-based viewpoint, we can say that edge detection corresponds to classifying which pixels in an image are edge pixels and singling out those edge pixels under a separate class correspondingly.
Edge detection is generally performed by using special filters that give us edges of the image upon convolution. These filters are calculated by dedicated algorithms that work on estimating image gradients in the x and y coordinates of the spatial plane.
An example of edge detection using the Canny edge detection algorithm, one of the most popular edge detection algorithms is shown below.

Clustering-based Segmentation
Modern segmentation procedures that depend on image processing techniques generally make use of clustering algorithms for segmentation.
Clustering algorithms perform better than their counterparts and can provide reasonably good segments in a small amount of time. Popular algorithms like the K-means clustering algorithms are unsupervised algorithms that work by clustering pixels with common attributes together as belonging to a particular segment.
K-means clustering, in particular, takes all the pixels into consideration and clusters them into “k” classes. Differing from region-growing methods, clustering-based methods do not need a seed point to start segmenting from.
Deep Learning-based methods
Semantic segmentation models provide segment maps as outputs corresponding to the inputs they are fed.
These segment maps are often n-channeled with n being the number of classes the model is supposed to segment. Each of these n-channels is binary in nature with object locations being “filled” with ones and empty regions consisting of zeros. The ground truth map is a single channel integer array the same size as the input and has a range of “n”, with each segment “filled” with the index value of the corresponding classes (classes are indexed from 0 to n-1).

The model output in an “n-channel” binary format is also known as a two-dimensional one-hot encoded representation of the predictions.
Neural networks that perform segmentation typically use an encoder-decoder structure where the encoder is followed by a bottleneck and a decoder or upsampling layers directly from the bottleneck (like in the FCN).
Convolutional Encoder-Decoder Architecture
Encoder decoder architectures for semantic segmentation became popular with the onset of works like SegNet (by Badrinarayanan et. a.) in 2015.
SegNet proposes the use of a combination of convolutional and downsampling blocks to squeeze information into a bottleneck and form a representation of the input. The decoder then reconstructs input information to form a segment map highlighting regions on the input and grouping them under their classes.
Finally, the decoder has a sigmoid activation at the end that squeezes the output in the range (0,1).
Check out 12 Types of Neural Networks Activation Functions to learn more about activation functions.

SegNet was accompanied by the release of another independent segmentation work at the same time, U-Net ( by Ronnerberger et. al.), which first introduced skip connections in Deep Learning as a solution for the loss of information observed in downsampling layers of typical encoder-decoder networks.
Skip connections are connections that go from the encoder directly to the decoder without passing through the bottleneck.
In other words, feature maps at various levels of encoded representations are captured and concatenated to feature maps in the decoder. This helps to reduce data loss by aggressive pooling and downsampling as done in the encoder blocks of an encoder-decoder architecture.
Skip Connections were a big hit, specifically in the domain of medical imaging, with U-Net providing state-of-the-art results in cell segmentation for the diagnosis of diseases.

Following UNet, DeepLab by Facebook served as a milestone, providing state-of-the-art results on semantic segmentation.
DeepLab made use of atrous convolutions replacing simple pooling operations and preventing significant information loss while downsampling. They further introduced multi-scale feature extraction with the help of Atrous Spatial Pyramid Pooling to help the network segment objects regardless of their sizes.
To recover boundary information, one of the most important parts of semantic as well as instance segmentation, they made use of fully connected Conditional Random Fields (CRFs).
Coupling the fine-grained localization accuracy of CRFs, the recognition capacity of CNNs led DeepLab to provide highly accurate segment maps, beating methods like FCNs and SegNet by a wide margin.

Papers like SegNet, U-Net, and DeepLab laid the groundwork for future work like Mask-RCNN, the DeepLab series by Facebook, and works like PspNet and GSCNN.
Need a recap of Neural Networks? Check out The Essential Guide to Neural Network Architectures.
Applications of Image Segmentation
Image segmentation is an important step in artificial vision. Machines need to divide visual data into segments for segment-specific processing to take place.
Image segmentation thus finds its way in prominent fields like Robotics, Medical Imaging, Autonomous Vehicles, and Intelligent Video Analytics.
Apart from these applications, Image segmentation is also used by satellites on aerial imagery for segmenting out roads, buildings, and trees.
Here are a few of the most popular real-world use cases of image segmentation.
Robotics (Machine Vision)
Image segmentation aids machine perception and locomotion by pointing out objects in their path of motion, enabling them to change paths effectively and understand the context of their environment.
Apart from locomotion, segmentation of images helps machines segregate the objects they are working with and enables them to interact with real-world objects using only vision as a reference. This allows the machine to be useful almost anywhere without much constraint.
Instance segmentation for robotic grasping
Recycling object picking
Autonomous navigation and SLAM
Medical imaging
Medical Imaging is an important domain of computer vision that focuses on the diagnosis of diseases from visual data, both in the form of simple visual data and biomedical scans.
Segmentation forms an important role in medical imaging as it helps doctors identify possible malignant features in images in a fast and accurate manner.
Using image segmentation, diagnosis of diseases can not only be speeded up but can also be made cheaper, thereby benefiting thousands across the globe.
X-Ray segmentation
CT scan organ segmentation
Dental instance segmentation
Digital pathology cell segmentation
Surgical video annotation
Check out 21+ Best Healthcare Datasets for Computer Vision to find quality medical datasets.
Smart Cities
Smart Cities often have CCTV cameras for real-time monitoring of pedestrians, traffic, and crime. This monitoring can be easily automated with the help of image segmentation.
With AI-based monitoring, crimes can be reported faster, road accidents can be followed up with immediate ambulances, and speeding cars can be easily caught and penalized.
The use of image segmentation and AI-based monitoring can thus improve the lifestyle of people.
Pedestrian detection
Traffic analytics
License plate detection
Video Surveillance
Self Driving Cars
Self Driving cars are one of the biggest applications of image segmentation with the planning of routes and movement depending heavily on it.
Semantic and instance segmentation helps these vehicles to identify road patterns and other vehicles, thereby enabling a hassle-free and smooth ride.
Drivable surface semantic segmentation
Car and pedestrian instance segmentation
In-vehicle object detection (stuff left behind by passengers)
Pothole detection and segmentation
Check out 27+ Most Popular Computer Vision Applications and Use Cases.

Hmrishav Bandyopadhyay studies Electronics and Telecommunication Engineering at Jadavpur University. He previously worked as a researcher at the University of California, Irvine, and Carnegie Mellon Univeristy. His deep learning research revolves around unsupervised image de-warping and segmentation.